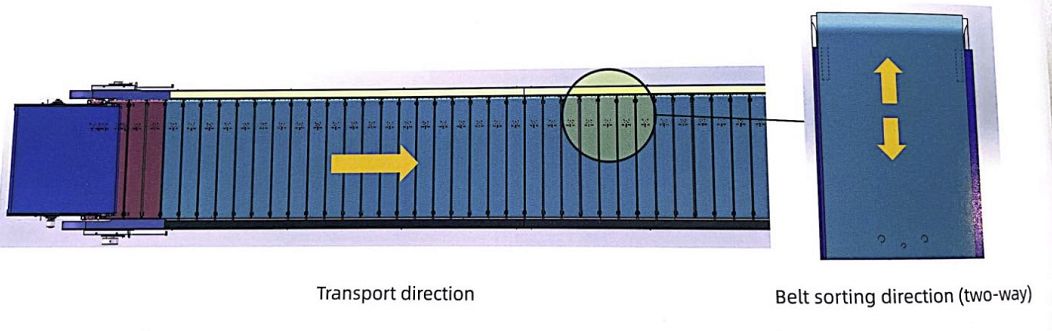
リニアクロスベルトソーターは、チェーンを介してモーターによって駆動され、小包を運ぶベルトキャリーを駆動します。スキャン システムがシュートとサイズの情報を取得した後、PLC 要求を介してシュートの方向転換機構をトリガーし、トロリーのベルトを 1 つずつ仕分け方向に移動させ、小包をシュートに配送し、小包の仕分けの目的を達成します。
| アイテム | パラメーター | ||
| モーターのパワー | 11kw(30-40m) | 15kw(40-50m) | 18.5kw(50-60m) |
| 搬送幅 | 1000mm | ||
| 搬送速度 | 1.5m/秒 | ||
| シュート中心距離 | 2200mm | ||
| 選別効率を最大限に高める | 6000PPH(パーセル長800mm時) | ||
| 最大ソートサイズ | 1600X1000(長さ×幅) | ||
| 最大仕分け重量 | 60kg | ||
| シュート幅 | 2400~2500mm | ||
| 区画間の最小間隔 | 300mm | ||
| キャリアピッチ | 15.24mm | ||
| ベルト幅 | 140mm | ||
| シフト角度 | 25度で幅1000mm、32度で幅1200mm | ||
| 電磁弁 | |||
| アイテム | パラメーター | |||
| モーターのパワー | 9kw(30-40m) | 11kw(40-50m) | 15kw(50-60m) | 18.5kw(60-100m) |
| 搬送速度 | 2~2.2m/秒 | |||
| 最小シュート幅 | 1000mm | |||
| 選別効率を最大限に高める | 8500PPH(パーセル長400mm時) | |||
| 電ドラムモーター動力 | 300W | |||
| 積載重量 | 60kg/分 | |||
| シュート幅 | 2400~2500mm | |||
| キャリアピッチ | 15.24mm | |||
| ベルト幅 | 126mm | |||
応用
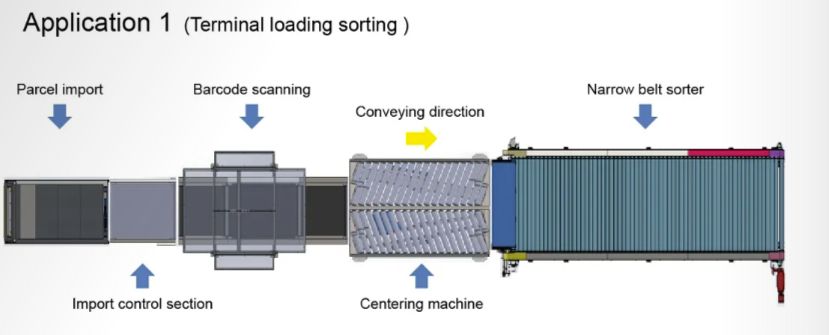
端子搭載仕分け
1. 小包は伸縮式ベルトコンベアまたはその他の方法で仕分けラインに輸入されました。
2. 小包は、バーコードグリッド情報と寸法情報を読み取った後、小包距離を達成するために輸入管理セクションによって管理されます。
3. センタリングマシンを通過した後、細ベルトソーターで指定されたグリッドに分類されます。
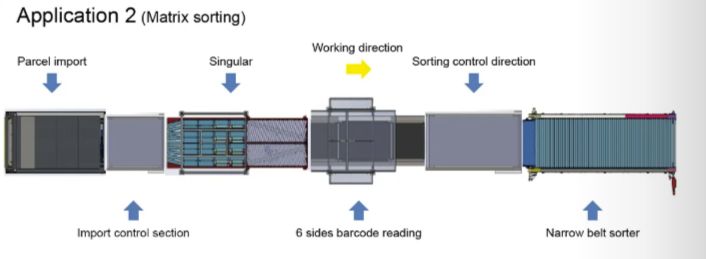
行列ソート
1. 小包は伸縮式ベルトコンベアまたはその他の方法で仕分けラインに輸入されました。
2. 単一のシステム読み取りおよびバーコードグリッド情報と寸法情報の読み取り後、小包は単一個で搬送されました。
3. ナローベルトソーターは、制御セクションの後の指定されたグリッドに小包を分類します。
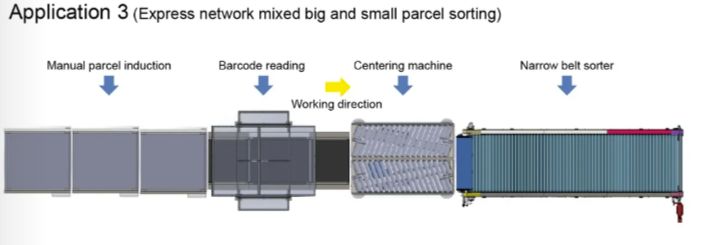
システム動作フロー
1. 手動で小包を誘導ベルトに置き、各ベルトには 1 つの小包のみが許可されるため、各小包が制御されます。
2. パーセルのグリッドおよび寸法情報がバーコード読み取りから読み取られました。
3. 仕分けされた小包は、センタリング機械の後、指定されたグリッドに落下します。
現場事例